FluxDAgger System
Overall architecture and design details
FluxDAgger is our proposed human-in-the-loop DAgger pipeline, featuring a model-decoupled architecture compatible with arbitrary VLA and reward models. The system is organized as a set of ROS nodes including camera nodes, sync observation node, model inference node, DAgger controller, DAgger collector, and reward node — all communicating through standardized topic interfaces to enable seamless module replacement.

Figure 1. FluxDAgger system architecture: a model-decoupled pipeline compatible with arbitrary VLA and reward models.
Data Collection System
The original data collection system is built upon a dual-arm teleoperation platform consisting of cameras, a master arm (for human demonstration), and a slave arm (for robot execution). This baseline system provides the hardware foundation upon which FluxDAgger's human-in-the-loop DAgger pipeline is constructed.

Figure 2. Overview of the original data collection system: camera, master arm, and slave arm components.
Hardware Modification
To adapt the original data collection hardware for the FluxDAgger pipeline, we modified the CAN communication topology from a shared bus to per-arm independent channels. In the original structure (Before), the master arm and slave arm were connected in series and shared one CAN bus branch through USB-to-CAN modules. In the modified structure (After), each arm is connected to an independent USB-to-CAN module, achieving one CAN interface per robotic arm so that each arm's master/slave mode can be configured independently.
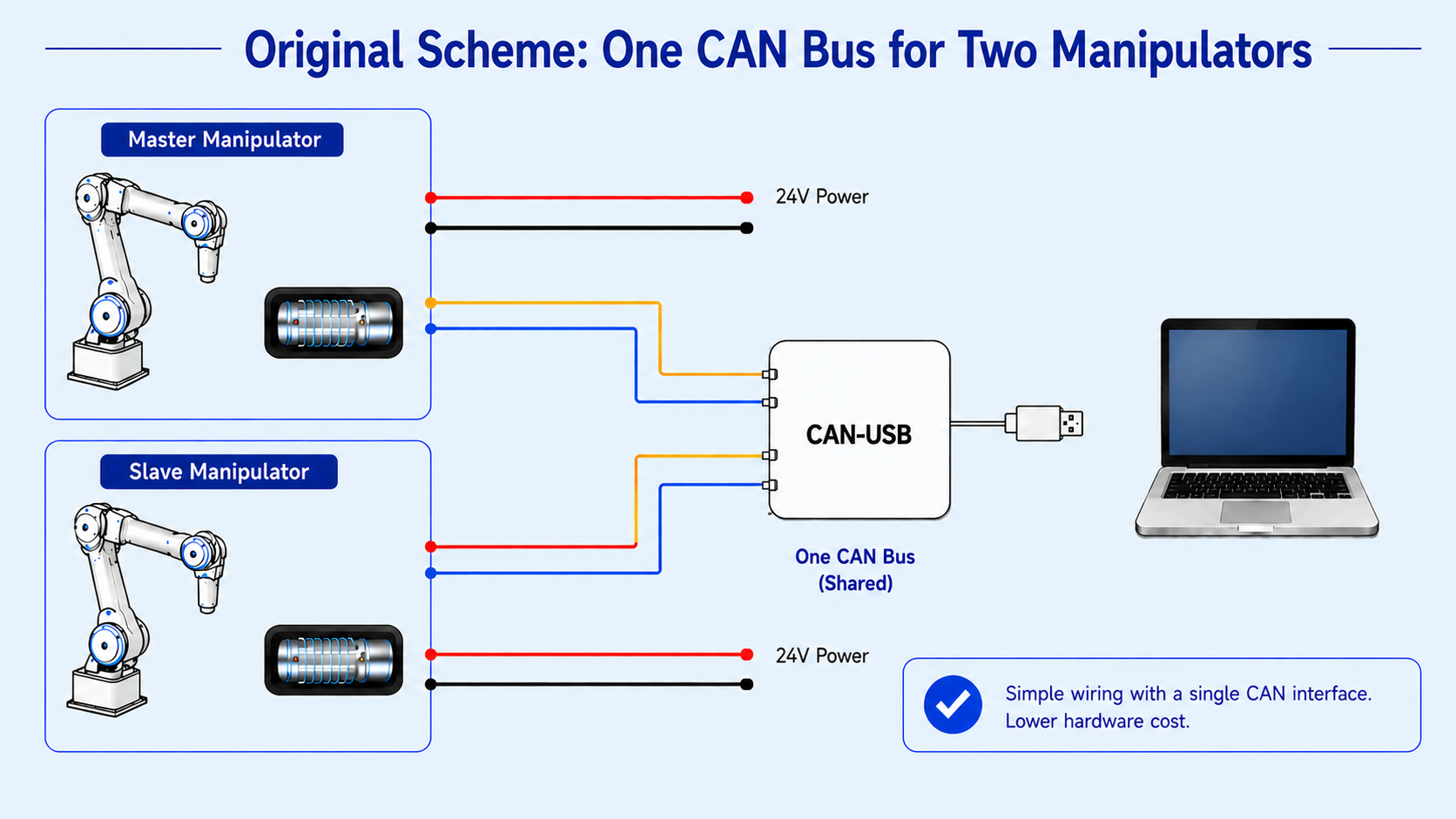
Master and slave arms are connected in series and share the same CAN bus branch.
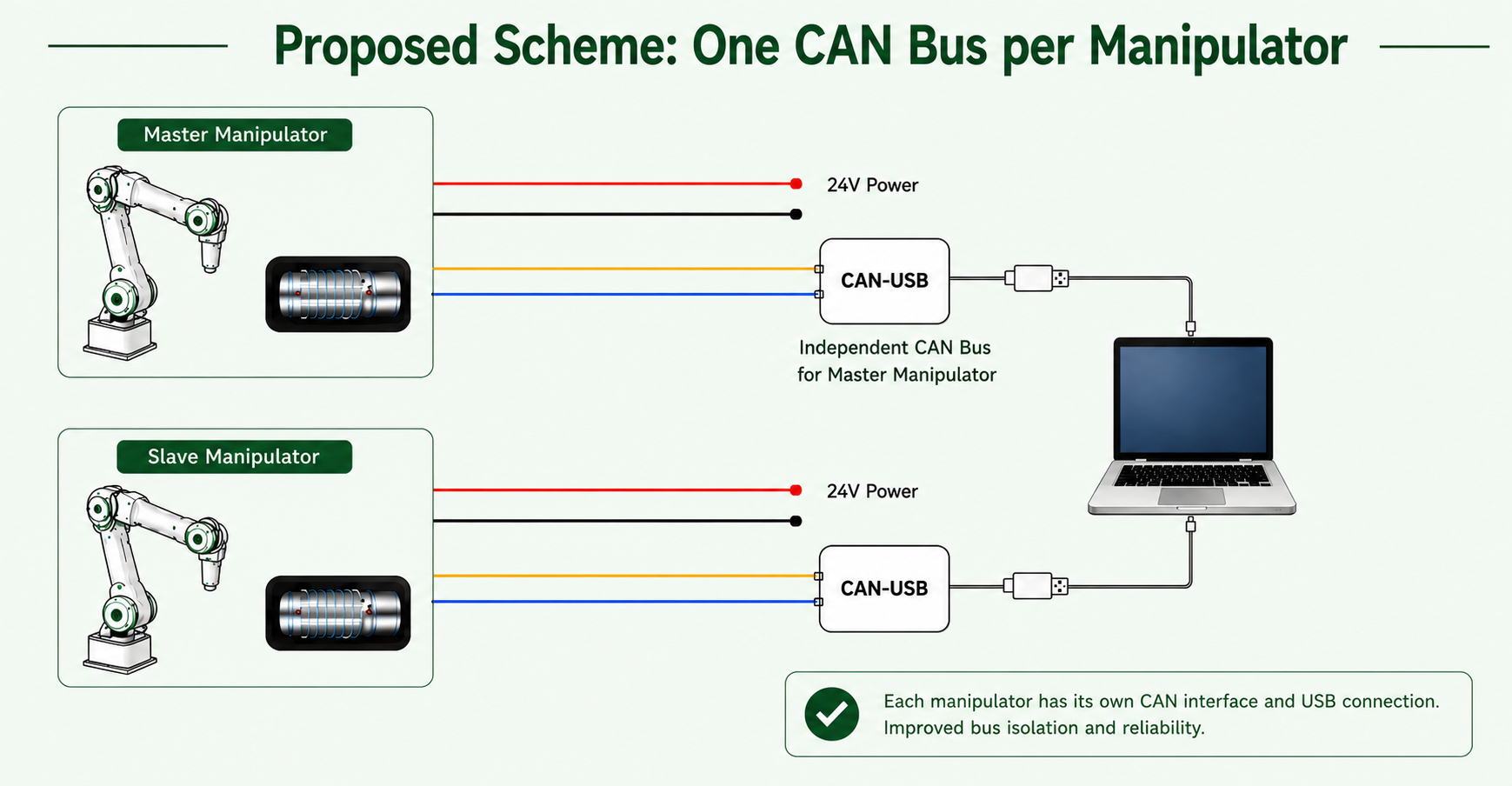
One USB-to-CAN module per arm: one CAN interface corresponds to one robotic arm.
Figure 3. Hardware modification from shared CAN-bus serial master-slave connection (Before) to per-arm independent USB-to-CAN mapping (After), i.e., one CAN interface per robotic arm.
Multi-Camera Synchronization
Precise temporal alignment across multiple camera streams is critical for consistent multi-view observations. FluxDAgger adopts the source data collection system's timestamp-based frame synchronization strategy: each camera maintains a frame buffer, and frames are aligned to a common sync timestamp. Frames arriving before the sync time are discarded (popleft if t < t1), ensuring all views correspond to the same physical moment. The right side shows the synchronized frame pair at timestamp t3 across all four camera views (front, head, left, right).

Figure 4. Multi-camera frame synchronization mechanism: timestamp-based alignment producing synchronized frame pairs across four camera views.
